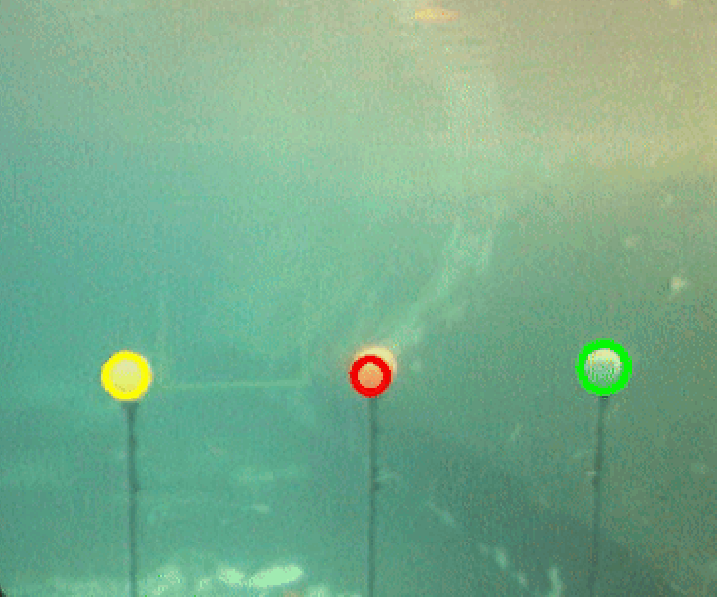
Buoy Detection using Gaussian Mixture Models
Implementation of Gaussian Mixture Model (GMM) for detecting and segmenting buoys in underwater imagery. Uses probabilistic modeling to identify colored buoys in challenging aquatic environments with varying lighting conditions and water clarity. Demonstrates application of statistical learning for real-world robotic perception tasks.
Method:
GMM
Application:
Object Detection
Domain:
Underwater Vision
Python
GMM
Computer Vision
OpenCV
Statistical Learning