Featured Projects
Research and production systems showcasing expertise in robotics, computer vision, and autonomous navigation

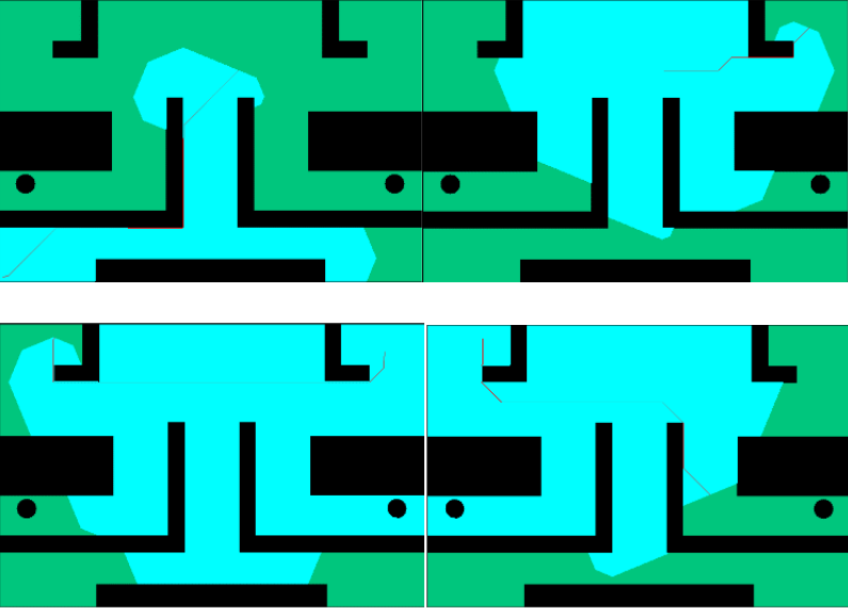
UV Sterilization Robot Path Planning
Voronoi-based Coverage Path Planning achieving 98% dose-qualified coverage with 27% reduction in mission time across 25 test environments.
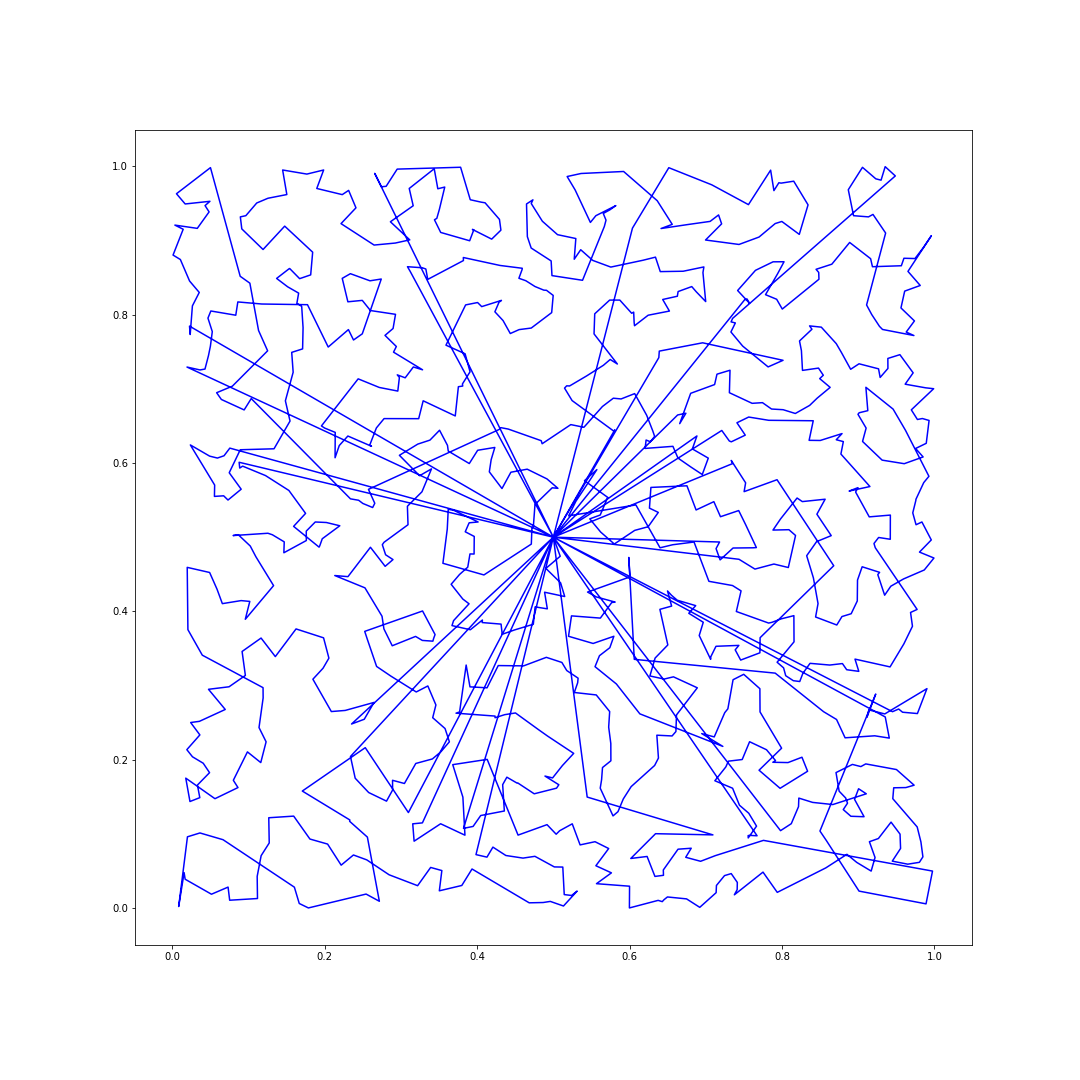
TSP with EV Charging Constraints
Multiple algorithmic approaches to solve the Traveling Salesman Problem with electric vehicle charging station constraints using genetic algorithms and optimization.
Autonomous Wall Following Robot
ROS-based implementation with PID control and laser scan processing for TurtleBot3, demonstrating robust obstacle detection and avoidance in simulation.
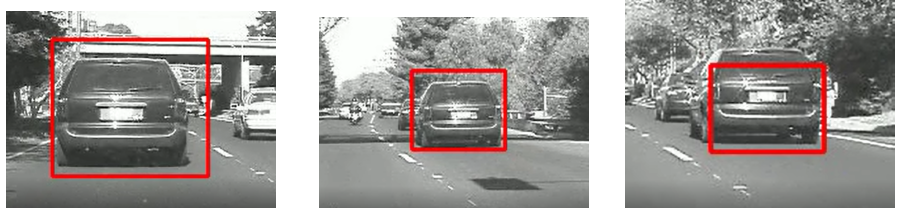
Lucas-Kanade Optical Flow Tracker
Implementation of Lucas-Kanade template tracker for real-time object tracking using optical flow estimation. Tracks moving objects with affine transform updates.

Dijkstra Algorithm Visualization
Interactive visualization of Dijkstra's pathfinding algorithm with real-time OpenCV rendering, demonstrating optimal route finding with obstacle avoidance.
Advanced UV Robot Path Planning
Research on optimal path planning for UV sterilization robots in complex environments, implementing multiple algorithms including BFS, Dijkstra, and A*.